Chapter : Circular Motion & Rotational Dynamics
11. Torque
11. Torque
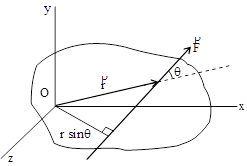
(a) The torque of force F about the point O is equal to the product of force and perpendicular distance of line of action of force from point.
τ = ¼ Force ½ x ¼ Perpendicular distance of line of action of force from point O)
= Fr sin θ = (F sin θ) r
= ¼ The component of force perpendicular to position vector) × ( Position vector )
∴ τ = Fr sin θ, r sin θ is known as lever arm
(b) Unit : In M.K.S = N-m and In C.G.S = dyne-cm
(c)dimension : M L2 T–2
(d) In vector form
 = r F sin θ
= r F sin θ  , where θ is angle between
, where θ is angle between  and
and  and is unit vector perpendicular to the plane of nd .
and is unit vector perpendicular to the plane of nd .
(e) Torque is a vector quantity, whose direction is perpendicular to the plane of force and position vector and its direction is given by right hand screw rule.
(f) If the torque rotates the body in anticlockwise direction, the torque is positive and if the torque rotates the body in clock-wire direction, the torque will be negative.
(g) If a body is acted upon by more than one force, the total torque is the vector sum of each torque.

(h) τ = I α
I - Moment of inertia with respect to axis of rotation.
α - Angular acceleration with respect to axis of rotation
τ- Torque of force which is causing the rotational motion
(i) , where
, where  is angular momentum
is angular momentum
(j) The more is the value of r, the more will be torque and easier to rotate the body.
i) The handle of screw driver is taken thick.
ii) In villages the handle of flour-mill is placed near the circumference.
iii) The handle of hand pump is kept-long.
iv) The r inch used for opening the tap, is kept-long.
(k) Work done by torque = = Torque × angular displacement.
= Torque × angular displacement.
(a) The torque of force F about the point O is equal to the product of force and perpendicular distance of line of action of force from point.
τ = ¼ Force ½ x ¼ Perpendicular distance of line of action of force from point O)
= Fr sin θ = (F sin θ) r
= ¼ The component of force perpendicular to position vector) × ( Position vector )
∴ τ = Fr sin θ, r sin θ is known as lever arm
(b) Unit : In M.K.S = N-m and In C.G.S = dyne-cm
(c)dimension : M L2 T–2
(d) In vector form
= r F sin θ , where θ is angle between and and is unit vector perpendicular to the plane of nd . (e) Torque is a vector quantity, whose direction is perpendicular to the plane of force and position vector and its direction is given by right hand screw rule.
(f) If the torque rotates the body in anticlockwise direction, the torque is positive and if the torque rotates the body in clock-wire direction, the torque will be negative.
(g) If a body is acted upon by more than one force, the total torque is the vector sum of each torque.
(h) τ = I α
I - Moment of inertia with respect to axis of rotation.
α - Angular acceleration with respect to axis of rotation
τ- Torque of force which is causing the rotational motion
(i)
, where is angular momentum (j) The more is the value of r, the more will be torque and easier to rotate the body.
i) The handle of screw driver is taken thick.
ii) In villages the handle of flour-mill is placed near the circumference.
iii) The handle of hand pump is kept-long.
iv) The r inch used for opening the tap, is kept-long.
(k) Work done by torque =
= Torque × angular displacement.Trending Articles & Blogs
- Physics Tutor, Math Tutor Improve Your Child’s Knowledge
- How to Get Maximum Marks in Examination Preparation Strategy by Dr. Mukesh Shrimali
- 5 Important Tips To Personal Development Apply In Your Daily Life
- Breaking the Barriers Between High School and Higher Education
- 14 Vocational courses after class 12th
- Tips to Get Maximum Marks in Physics Examination
- Get Full Marks in Biology Class 12 CBSE
Download Old Sample Papers For Class X & XII
Download Practical Solutions of Chemistry and Physics for Class 12 with Solutions